| |
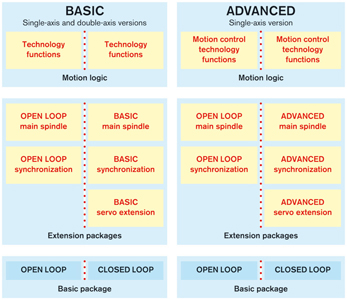
BASIC OPEN LOOP |
BASIC CLOSED LOOP |
ADVANCED OPEN LOOP |
ADVANCED CLOSED LOOP |
| 概述 |
| 電子銘牌 |
|
● |
● |
● |
● |
| 自動反饋控制系統(tǒng)調(diào)節(jié) |
|
● |
● |
● |
● |
| 用于控制器優(yōu)化的實際值發(fā)生器 |
|
● |
● |
● |
● |
| 可調(diào)出錯響應(yīng) |
|
● |
● |
● |
● |
| 制動控制 |
|
● |
● |
● |
● |
| 示波器功能 |
|
● |
● |
● |
● |
| 開環(huán)基本功能 |
| 帶 U/f 特征曲線的電機(jī)控制器,包含滑差補(bǔ)償 I x R 補(bǔ)償和傾動保護(hù) |
|
● |
● |
● |
● |
| 無傳感器的電源矢量調(diào)節(jié) |
|
● |
● |
● |
● |
| 啟動編碼器的轉(zhuǎn)速 |
|
● |
● |
● |
● |
| Motorpoti 功能 |
|
● |
● |
● |
● |
| 閉環(huán)基本功能 |
| 位置��、速度和扭矩控制 |
|
- |
● |
- |
● |
| 驅(qū)動器控制的返回參考點 |
|
- |
● |
- |
● |
| 驅(qū)動器控制的定位 |
|
- |
● |
- |
● |
| 驅(qū)動器內(nèi)部插補(bǔ) |
|
- |
● |
- |
● |
| 定位塊模式 |
|
- |
● |
- |
● |
| 位置���、速度和扭矩限制 |
|
- |
● |
- |
● |
| 自動轉(zhuǎn)換設(shè)置 |
|
- |
● |
- |
● |
| 帶門切換的路徑開關(guān)點 |
|
- |
● |
- |
● |
| 編碼器仿真,增量編碼器或絕對值編碼器(SSI 格式) |
|
- |
● |
- |
● |
| 自動重量負(fù)載檢測 |
|
- |
● |
- |
● |
| 伺服擴(kuò)展 |
| 簡單反向間隙補(bǔ)償 |
|
- |
● |
- |
● |
| 軸偏差修正 |
|
- |
- |
- |
● |
| 象限偏差修正 |
|
- |
- |
- |
● |
| 摩擦扭矩補(bǔ)償 |
|
- |
● |
- |
● |
| 帶快速停止的探針 |
|
- |
1 |
- |
2 |
| 動態(tài)凸輪驅(qū)動裝置 |
|
- |
● |
- |
● |
| SRAM |
| 參數(shù)組切換 |
|
● 1) |
● |
● |
● |
| 主軸定位工作模式 |
|
- |
● |
- |
- |
| 用于齒輪換檔的驅(qū)動器控制擺動 |
|
- |
- |
- |
● |
| 同步 |
| 速度同步 |
|
● |
● |
● |
● |
| 角度同步 |
|
- |
● |
- |
● |
| 測量輪模式 |
|
- |
● |
- |
● |
| 實際和虛擬主軸 |
|
● |
● |
● |
● |
| 凸輪盤(列表值) |
|
- |
● |
- |
● |
| 凸輪盤(分析值) |
|
- |
- |
- |
● |
| 帶時間測量的探針 |
|
1 |
- |
1 |
- |
| 帶同步功能的探針 |
|
- |
1 |
- |
2 |
| 動態(tài)凸輪驅(qū)動裝置 |
|
- |
● |
● |
● |
| IndraMotion MLD |
| EtherCat Slave |
|
● 2) |
● 2) |
● |
● |
| EtherCat Slave |
|
● 2) |
● 2) |
● |
● |
| EtherCat Slave |
|
● 2) |
● 2) |
● |
● |
| EtherCat Slave |
|
● 2) |
● 2) |
● |
● |
| EtherCat Slave |
|
● 2) |
● 2) |
● |
● |
| EtherCat Slave |
|
● 2) |
● 2) |
● |
● |